Лекция 1. Системы реального времени. Виды ОС РВ. Требования к ОС РВ
Управление автоматическими или автоматизированными комплексами, предъявляющими высокие требования к времени выполнения задач осуществляется операционными системами реального времени. Они обеспечивают гарантированное время реакции на внешние события и минимальные задержки.
Операционная система реального времени, ОС РВ (англ. Real-Time Operating System) — тип операционной системы, как правило, специального назначения. Для этого термина есть различные определения, порой противоречащие друг другу:
- ОС, в которой успешность работы любой программы зависит не только от её логической правильности, но и от времени, за которое она получила этот результат. Если система не может удовлетворить временным ограничениям, должен быть зафиксирован сбой в её работе
- Стандарт POSIX 1003.1 даёт определение: «Реальное время в операционных системах — это способность операционной системы обеспечить требуемый уровень сервиса в определённый промежуток времени»
- ОС, реагирующая в предсказуемое время на непредсказуемое появление внешних событий
- Интерактивные системы постоянной готовности. В категорию ОС РВ их относят исходя из маркетинговых соображений и если интерактивную программу называют «работающей в реальном времени», то это лишь означает, что запросы от пользователя обрабатываются с задержкой, незаметной для человека.
- Иногда понятие системы реального времени отождествляют с «быстрой системой», но это не всегда правильно, так как важно не время задержки реакции ОС РВ, а то, чтобы этого времени было достаточно для рассматриваемого приложения и оно было гарантированно.
- Во многих специализированных сферах вводят свои понятия «реального времени». Например, процесс цифровой обработки сигнала называют идущим в реальном времени, если анализ и/или генерация данных может быть произведён за то же время, что и анализ/генерация тех же данных без цифровой обработки сигнала. Например, если при обработке аудио данных требуется 2,01 секунд на анализ 2,00 секунд звука, то это не процесс реального времени. Если же требуется 1,99 секунд, то это процесс реального времени.
Для систем реального времени характерно следующее:
- гарантированное время реакции на внешние события (например на прерывания от оборудования);
- жёсткая подсистема планирования процессов (высокоприоритетные задачи не должны вытесняться низкоприоритетными, за некоторыми исключениями);
- повышенные требования к времени реакции на внешние события или реактивности (задержка вызова обработчика прерывания не более десятков микросекунд, задержка при переключении задач не более сотен микросекунд)
Классическим примером задачи, где требуется ОС РВ, является управление роботом, берущим деталь с ленты конвейера. Деталь движется и робот имеет лишь маленький промежуток времени, когда он может её взять. Если он опоздает, то деталь уже не будет на нужном участке конвейера, и следовательно, работа не будет сделана, несмотря на то, что робот находится в правильном месте. Если он спозиционируется раньше, то деталь ещё не успеет подъехать, и он заблокирует ей путь.
Виды ОС РВ
Динамические свойства программ реального времени принято характеризовать тремя определениями: программы «жесткого» (hard), «мягкого» (soft) и интерактивного («условного») реального времени.
Жесткое реальное время. Предусматривает наличие гарантированного времени отклика системы на конкретное событие, например, аппаратное прерывание, выдачу команды управления и т.п. Абсолютная величина времени отклика большого значения не имеет. Так, если необходимо, чтобы программа отработала некоторую команду за 1 миллисекунду, но она справляется с этим заданием лишь в 95% случаев, а в 5% не укладывается в норматив, такую систему нельзя охарактеризовать как работающую в жестком реальном времени. Если же команду нужно отработать в течение часа, что и происходит в 100% случаев – налицо жесткое реальное время.
В большинстве русскоязычной литературы такие системы называют системами с детерминированным временем. При практическом применении время реакции должно быть минимальным.
Мягкое реальное время. В этом случае ожидающееся время отклика системы является величиной скорее индикативной, нежели директивной. Конечно, предполагается что в большинстве случаев (процентов 80 — 90) отклик уложится в заданные пределы. Однако и остальные варианты – в том числе полное отсутствие реакции системы – не должны приводить к плачевным результатам. Обычно считается, что если временной норматив превышен на один порядок, то это еще терпимо .
Интерактивное реальное время. Является скорее психологической, нежели технической характеристикой. Определяет время, в течение которого оператор – человек – способен спокойно, без нервозности, ожидать реакции системы на данные им указания. В качестве примера можно привести весьма популярные сегодня игры из категории «стратегии реального времени» (real-time strategy, см. например квазар на основе Warhammer).
В системах реального времени необходимо введение некоторого директивного срока (в англоязычной литературе – deadline), до истечения которого задача должна обязательно (для систем мягкого реального времени – желательно) выполниться. Этот директивный срок используется планировщиком задач как для назначения приоритета задачи при ее запуске, так и при выборе задачи на выполнение.
Зачастую под СРВ безусловно понимают встроенные операционные системы, на деле же, существует различие между системами реального времени и встроенными системами. От встроенной системы не всегда требуется, чтобы она имела предсказуемое поведение, и в таком случае она не является системой реального времени. Однако даже беглый взгляд на возможные встроенные системы позволяет утверждать, что большинство встроенных систем нуждается в предсказуемом поведении, по крайней мере, для некоторой функциональности, и таким образом, эти системы можно отнести к системам реального времени.
Основные требования к ОС РВ
Мартин Тиммерман (директор компании-разработчика встраиваимых систем Dedicated Systems Experts) сформулировал следующие необходимые требования для ОС РВ:
- ОС должна быть многозадачной и допускающей вытеснение (preemptable),
- ОС должна обладать понятием приоритета для потоков,
- ОС должна поддерживать предсказуемые механизмы синхронизации,
- ОС должна обеспечивать механизм наследования приоритетов,
- поведение ОС должно быть известным и предсказуемым (задержки обработки прерываний, задержки переключения задач, задержки драйверов и т.д.); это значит, что во всех сценариях рабочей нагрузки системы должно быть определено максимальное время отклика.
Особенности архитектуры ОС РВ
В течение последних 25-30 лет структура операционных систем эволюционировала от монолитной к многослойной структуре ОС и далее к архитектуре клиент-сервер. Эти решения в той или иной степени нашли применение и при разработке операционных систем реального времени.
Монолитная архитектура представляет систему, состоящую из набора взаимодействующих модулей. Приложения обращаются к системе через API модулей. Изменения одного модуля влияют на другие модули. Чем больше модулей, чем сложнее они связаны между собой, тем тем менее предсказуемо поведение такой системы в процессе эксплуатации. Кроме того, возникают трудности для использования ОС такого типа в распределенной многопроцессорной системе.
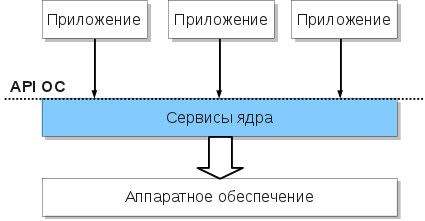
Рис.1. Монолитная архитектура ОС РВ
Многослойная архитектура описывает систему, состоящую из нескольких функциональных уровней. Приложение может обращаться к аппаратным ресурсам как через системные вызовы ядра и системные службы, так и через API уровней. Вообще-то, возможность обращения к нижележащим слоям минуя верхние уровни семантически неверно, но для систем реального времени такая организация позволяет увеличить предсказуемость системы и снизить время отклика. Недостатком многослойной архитектуры является то, что изменения одного слоя влияют на соседние слои. Еще один недостаток, свойственный многослойной архитектуре – отсутствие многозадачности. Однако, далеко не всегда и не всем системам реального времени требуется поддержка многозадачности. Например, сложно обосновать необходимость многозадачного режима для встроенной ОС промышленного робота, подающего детали на конвейер.
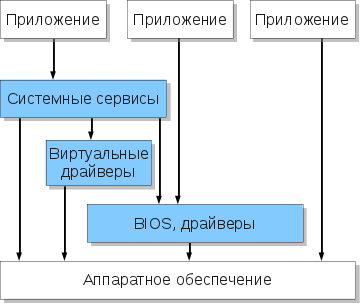
Рис.2. Многослойная архитектура ОС РВ
Клиент-серверная архитектура ОС основана на минимизации количества функций, выполняемых ядром (точнее, микроядром) такой системы. Например, на уровне ядра выполняются только планировщик, примитивы синхронизации и служба сообщений. Вся остальная функциональность выносится на пользовательский уровень и реализуется через серверы. Приложения-клиенты обращаются к ним и получают от них ответы путем обмена сообщениям через службу сообщений уровня ядра.
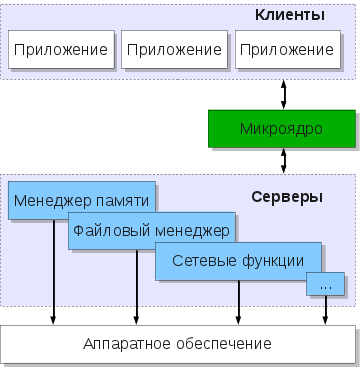
Рис.3 Клиент-серверная архитектура ОС РВ
Клиент-серверная архитектура позволяет создавать масштабируемые ОС и упрощает распределение в многопроцессорной системе. При эксплуатации системы замена одного модуля не вызывает эффекта “снежного кома”; кроме того, сбой модуля не всегда влечет за собой отказ системы в целом. Появилась возможность динамической загрузки и выгрузки модулей. Главной проблемой в этой модели является защита памяти, поскольку серверные процессы должны быть защищены. При каждом запросе сервиса система должна переключаться с контекста приложения на контекст сервера. При поддержке защиты памяти время переключения с одного процесса на другой увеличивается.
Контрольные вопросы
- Дайте определение операционной системы реального времени
- Что такое deadline?
- В чем отличие «жесткого» реального времени от «мягкого»
- Сформулируйте основные требования к ОС РВ
- Укажите основные отличия в требованиях к ОС РВ от универсальных ОС
- Опишите модульную архитектуру
- Опишите многослойную архитектуру
- Опишите клиент-серверную архитектуру
CC-BY-CA Анатольев А.Г., 31.01.2012